




Pribor i rezervni dijelovi
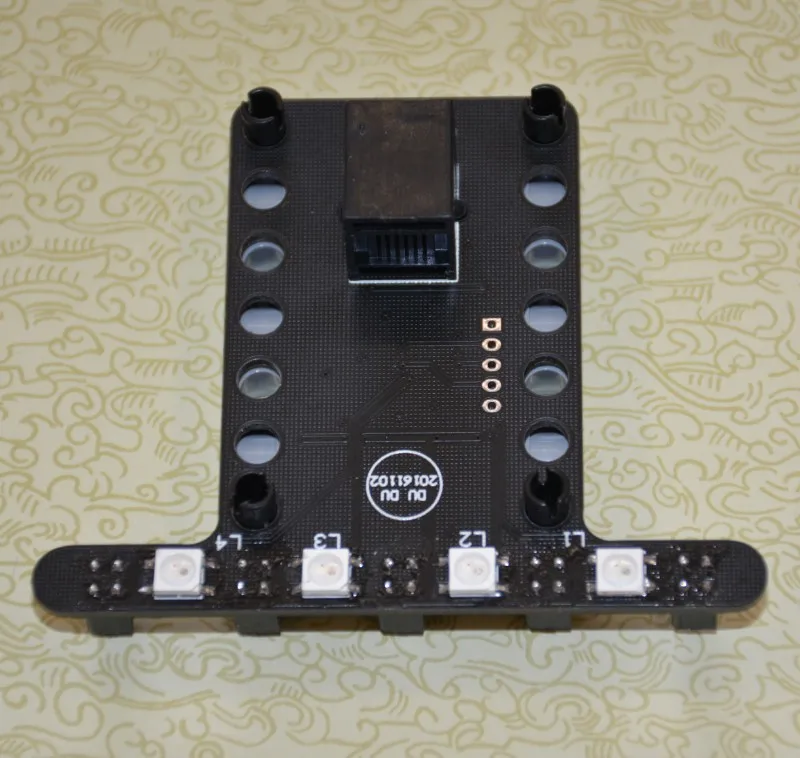
Pet način infracrveni linijski modul ophodnju EV3, koji prati auto-senzor, четырехпозиционный led u boji modul WS2812
modname=ckeditoru
016 пятипозиционная патрульная linija + четырехпозиционный modula boja svjetla
Funkcija 01
1: Uključite izvornu vrijednost oglašavanja na osam kanala i vrijednost umanjenog za obradu i koristite je za određivanje linije i određene odredbe.
2: Upravljanje izlazom 4 žarulje
02 Hardvera vezu
02_0 Univerzalna veličina modula i modul s fiksnim režimom rada
Dimenzije odgovaraju dimenzijama pravokutnog konstrukcija Lego kocke veličine 5 na 7 blokova Lego
Rupe oko modul kompatibilan s rupama LEGO i iskazuju izravno crnim штифтами Lego kockice ili kombinacijom zaštitnog vratila i kućišta poluosovina
osnova okvira 1,5 * 7, crna igla za oko
osnova okvira 2,5 * 7, sa vodič vratila + čahurom na pola vratila (preporučujemo ovaj način za fiksiranje, da ne oštetite pin)
3. Drugi klipnjaču ili temelj sučelja LEGO + nosač crne pin ili pin vratila + polovica vratila
4. Bilo koja kombinacija
02_1 Uvoz programskog modula
Pomoću alata EV3-Lab software gore lijevo - Uvezite modul xunxian_V110.ev3b (verzija Vxxx) i ponovo pokrenite softver.Pod modulom action možete vidjeti modul пятиканальной sheme, a zatim izabrati odgovarajući režim za korištenje.
Hardverski modul 02_2 spojen na EV3
Spojite jedan kraj kabela za prijenos podataka na port na hardveru, a drugi kraj na jedan od ulaza osjetnika (1.2.3.4) na kontroleru EV3.
Nakon završetka hardver za povezivanje na priključak u donjem desnom uglu softvera EV3-Lab, prikazat će se simbol očitavanje električne energije ili PŠENICA.Ova ikona označava da je veza samo, ali ne i ima drugu vrijednost.Određena značajka ovisi o čitanje podataka modula.
03 Korištenje softvera
03_1 Zaključak osam izvornih vrijednosti sive boje
Zaključak osam izvornih vrijednosti AD u rasponu od 0 do 4096. Stvarna vrijednost ovisi o stvarnoj veličini.
Formula za ispravljanje pogrešaka parametra PID izgleda ovako:
Postavljanje parametara za pronalaženje najboljih, provjera od malih do velikih naloga
Vi ste интегрируете vrijednost, a zatim dodati nasmijao
Krivulja jako varira.Skala skale potrebno povećati
Krivulja pliva oko velikog pretinca, a skala je skala pomiče na malo отсеку
Oporavak odstupanja krivulja se događa polako, i vrijeme integracije u opadanju
Ako je razdoblje oscilacije krivulje je super, vrijeme integracije će biti više
Krivulja kreće se brzo, pa neka уменьшим nasmijao
Veliki trenutak za usporavanje vibracija.Diferencijalna vrijeme bi trebao biti povećan
Idealna krivulja iz dva vala, prednji maksimuma i stražnjeg minimum 4 1
Pogledajte još dva analize kvaliteta regulacije ne biti nizak
Preporučeni vještine za ispravljanje pogrešaka:
Prvo podesite koeficijent proporcionalnosti kp (u roku od 1 svaki put promijenite 0,1), a zatim podesite diferencijalni koeficijent kd (svaki put povećati na 2-3, dok se karoserija vozila se ne može brzo prilagoditi na rotirajuće dijelove i dok прямолинейная dio neće biti značajno rock) i, napokon, podesite integralni faktor ki (zbog velike vrijednosti integrala člana obično reguliraju 0,01 i mijenjaju na 0,01 svaki put, dok je karoserija automobila neće biti značajno rock).
Hvala vam za gore navedene informacije o PID dobivene od korisnika kineskog foruma LEGO, molimo, kliknite na određeni sadržaj objave
Vaša adresa e-pošte neće biti objavljen. Obavezna polja označena *
- Podrijetlo : Kontinentalna Kina
Srodni proizvodi

Pribor i rezervni dijelovi
1 kom. Novi daljinski Upravljač Za T95Z plus T95R PR T95W pro T95U pro T95K pro T95V pro Q PLUS Amlogic S912 Android Smart Tv Box
novi daljinski upravljač za t95z plus t95r pr t95w pro t95u pro t95k pro t95v pro q plus amlogic s912 android smart tv box osnovne karakteristike pogodan model:qbox t95z plus t95wpro t95upro t95kpro t95vpro model serije amlogic s912 t95. napomena:
Pribor i rezervni dijelovi
Za hard disk EMC 005053507 005053508 005053504 005053503 4T 7.2 K SAS
molimo vas, ne ustručavajte se postavljati pitanja o točnom stanju proizvoda. molim vas, ako bilo kakvih pitanja ili bilo kakvih problema s vašom narudžbom, slobodno nam se obratite, a mi odmah ćemo se pobrinuti o tome.
Pribor i rezervni dijelovi
Univerzalna Smart tv Remote Control Zamjena Potrošačke Elektronike za R51/E R51/ E R51/ CE R51M/ CE R51D/E R51M/B
karakteristike: daljinski upravljač klima uređaj za media r51d, r51m, r51e, rg51113 /bgce. on je praktičan i intuitivan, prikaz više jasan i dugotrajna. jednostavan za korištenje, nema mirisa, nije otrovan i ugodan na dodir. tehničke
Pribor i rezervni dijelovi
3,5 "i 2,5" SATA IDE 2 Dvostruko ležište za hard disk Dock e-SATA Hub Vanjsko Kućište za Pohranu Podataka Dijelovi EU US plug
lice: 1. podrška za vruće veze i mogućnost demontaže tvrdi disk bez korištenja alata 2.one-touch funkcija backup(na usb port samo) 3.led indikator napajanja 4.podrška profila za hard disk, kloniranje/kopiranje, kad se to ne priključujte
Pribor i rezervni dijelovi
2 komada, 60 minuta, standardna kaseta, Prazan kasetofon, Prazna snimanje na traku Za govor, Snimanje glazbe MP3 /DVD
583d 2 komada 60 minuta standardna traka prazna traka prazna traka za snimanje govora, glazbe, mp3/dvd ootdty potpuno novi high-end; praznu kasetu. odlična traka za snimanje svih ciljeva. optimalno dizajniran za snimanje glasa,
Pribor i rezervni dijelovi
Smjenski teleskopska antena 60 cm sa 4 radijatora, antena za radio i televiziju
antena dužina bez istezanje: 15,8 cm / 6,2 inča maksimalni promjer: 0,6 cm / 0,24 inča broj sekcija: 4 dijela puna dužina: 60 cm/23,6 6 poglavlja teleskopske antene. idealna zamjena dio za radio, tv, auto antena, telefonske antene, itd. promjer montažnog otvora:
Pribor i rezervni dijelovi
LT8609SEV LQFN-16 Novi originalni integrirani čip
dobrodošli u naš dućan! nudimo proizvode po najboljoj cijeni i visoke kvalitete, a također i najviše zadovoljavajuće usluga ako vam je potrebno kupiti veliku količinu robe, molimo vas, kontaktirajte nas, cijena može biti najniže, neka порадуемся
Pribor i rezervni dijelovi
6ES7131-6BF01-0BA0 6ES7131-6BF00-0BA0 6ES7132-6BF01-0BA0 izlazni modul je Potpuno novi i originalni. Garancija jednu godinu, brza isporuka.
obećavamo da vam jamčimo 100% zadovoljstvo kupaca, ako imate bilo kakvih pitanja, molimo vas javite nam i mi ćemo se potruditi da ispravi situaciju.mi u potpunosti podržavamo sve proizvode koje prodajemo.nudimo 100% zadovoljstvo kupaca, ako imate bilo kakvih pitanja,
Pribor i rezervni dijelovi
40 kom. računalni tv stalak za LCD monitor držač pričvrsni vijak M4x10mm
nudimo popust u velikom broju.dobrodošli, kontaktirajte nas! 40 komada pričvrsni vijak za nosač nosači za lcd monitor za računalo tv m4x10mm naziv proizvoda: pričvrsne vijke za nosač za tv-monitora glava vozača: križarski rat vijak veličine
Pribor i rezervni dijelovi
2X USB 3.0 Type-C Otg Kabel-ac Adapter Type C USB-C Otg Pretvarač Za Xiaomi Mi5 Mi6 Huawei Miš Tipkovnica USB Flash Disk
2x usb 3.0 type-c otg kabel-ac adapter type c usb-c otg pretvarač za xiaomi mi5 mi6 huawei miš tipkovnica usb flash disk podsjećam: molimo vas, pobrinite se da vaš telefon podržava otg. 100% potpuno novi adapter type-c za povezivanje perifernih
Pribor i rezervni dijelovi
Kabel za punjenje Micro-Usb dužine 1,2 m, kabel za napajanje za NG BOOM/MEGABOOM ROLL, Bluetooth-kompatibilna prijenos podataka dinamika
lice: dužina žice iznosi 1,2 metra, to je dovoljno za korištenje. usb kabel podržava rad sa zvučnicima ue boom/megaboom roll. umjerena težina i kompaktna veličina, njihov jednostavan i zgodan za nositi sa sobom, izlazak na ulicu. samo
Pribor i rezervni dijelovi
E2A-M18KN16-WP-B1 E2A-M18KN16-WP-C1 Novi high-end senzor za prebacivanje
puno vam hvala na posjeti naše priče! o proizvodu 1. ako ste dobili proizvod, molimo vas da potvrdite primitak, a ako je proizvod oštećen, molimo vas, molimo da nas odmah kontaktirate.pošaljite nam fotografiju i mi ćemo provjeriti i ponuditi vam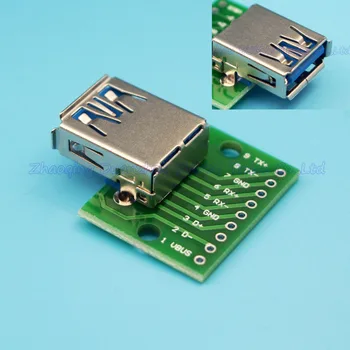
Pribor i rezervni dijelovi
10 kom./lot priključak USB 3.0 DIP-modul naknada adapter usb 3.0
usb 3.0 priključak dip-modul naknada adapter usb 3.0 plaćanje primamo uvjetno депонированием.dostava 1. poslat ćemo vam robu u roku od 7 dana nakon primitka uplate. 2. ako želite druge načine isporuke, kontaktirajte nas i mi ćemo iskoristiti
Pribor i rezervni dijelovi
1 kom. adapter utičnice SAD/EU 2pin 4,0 mm europska vilica EU-SAD-Adapter za napajanje Pretvarač Električna utičnica
